

Linux学习第22天:Linux中断驱动开发(一): 突如其来
作者:小教学发布时间:2023-09-29分类:程序开发学习浏览:231
Linux版本号4.1.15 芯片I.MX6ULL 大叔学Linux 品人间百味 思文短情长
中断作为驱动开发中很重要的一个概念,在实际的项目实践中经常用到。本节的主要内容包括中断简介、硬件原理分析、驱动程序开发及运行测试。其中驱动程序的开发是本节的重点内容。
本节内容较多,分两次更新。
本笔记的思维导图如下:
一、Linux中断简介
1.中断API函数
中断号:很好理解,不赘述了。
request_irq函数:申请中断,不能在中断上下文或者其他禁止睡眠的代码段中使用
request_irq 函数会激活(使能)中断,所以不需要我们手动去使能中断, request_irq 函数原型
如下:
int request_irq(unsigned int irq,
irq_handler_t handler,
unsigned long flags,
const char *name,
void *dev)irq:要申请中断的中断号。
handler:中断处理函数,当中断发生以后就会执行此中断处理函数。
flags:中断标志
name:中断名字,设置以后可以在/proc/interrupts 文件中看到对应的中断名字。
dev: 如果将 flags 设置为 IRQF_SHARED 的话, dev 用来区分不同的中断,一般情况下将
dev 设置为设备结构体, dev 会传递给中断处理函数 irq_handler_t 的第二个参数。
返回值: 0 中断申请成功,其他负值 中断申请失败,如果返回-EBUSY 的话表示中断已经
被申请了。
free_irq 函数:中断释放
如果中断不是共享的,那么 free_irq 会删除中断处理函数并且禁止中断。 free_irq
函数原型如下所示:
void free_irq(unsigned int irq,
void *dev)irq: 要释放的中断。
dev:如果中断设置为共享(IRQF_SHARED)的话,此参数用来区分具体的中断。共享中断
只有在释放最后中断处理函数的时候才会被禁止掉。
返回值:无。
中断处理函数:
中断处理函数格式如下所示:
irqreturn_t (*irq_handler_t) (int, void *)第一个参数是要中断处理函数要相应的中断号。第二个参数是一个指向 void 的指针,也就
是个通用指针,需要与 request_irq 函数的 dev 参数保持一致。用于区分共享中断的不同设备,
dev 也可以指向设备数据结构。中断处理函数的返回值为 irqreturn_t 类型, irqreturn_t 类型定义
如下所示:
10 enum irqreturn {
11 IRQ_NONE = (0 << 0),
12 IRQ_HANDLED = (1 << 0),
13 IRQ_WAKE_THREAD = (1 << 1),
14 };
15
16 typedef enum irqreturn irqreturn_t;一般中断服务函数返回值使用如下形式:
return IRQ_RETVAL(IRQ_HANDLED)中断使能与禁止:
void enable_irq(unsigned int irq)
void disable_irq(unsigned int irq)需要保证不会产生新的中断,并且确保所有已经开始执行的中断处理程序已经全部退出。在这种情况下,可以使用另外一个中断禁止函数:
void disable_irq_nosync(unsigned int irq)关闭当前处理器的整个中断系统:
local_irq_enable()
local_irq_disable()要考虑到别的任务的感受,此时就要用到下面两个函数:
local_irq_save(flags)
local_irq_restore(flags)这两个函数是一对, local_irq_save 函数用于禁止中断,并且将中断状态保存在 flags 中。
local_irq_restore 用于恢复中断,将中断到 flags 状态。
2.上半部和下半部
上半部:上半部就是中断处理函数,那些处理过程比较快,不会占用很长时间的处理就可
以放在上半部完成。
下半部:如果中断处理过程比较耗时,那么就将这些比较耗时的代码提出来,交给下半部
去执行,这样中断处理函数就会快进快出。
需要放到下半部的:
1)不希望被打断
2)时间敏感
3)硬件相关
Linux 内核使用结构体 softirq_action 表示软中断,内容如下:
433 struct softirq_action
434 {
435 void (*action)(struct softirq_action *);
436 };softirq_action 结构体中的 action 成员变量就是软中断的服务函数
要使用软中断,必须先使用 open_softirq 函数注册对应的软中断处理函数, open_softirq 函数原型如下:
void open_softirq(int nr, void (*action)(struct softirq_action *))nr:要开启的软中断,在示例代码 51.1.2.3 中选择一个。
action:软中断对应的处理函数。
返回值: 没有返回值。
注册好软中断以后需要通过 raise_softirq 函数触发, raise_softirq 函数原型如下:
void raise_softirq(unsigned int nr)nr:要触发的软中断
无返回值
! Linux 内核使用 softirq_init 函数初始化软中断。
634 void __init softirq_init(void)
635 {
636 int cpu;
637
638 for_each_possible_cpu(cpu) {
639 per_cpu(tasklet_vec, cpu).tail =
640 &per_cpu(tasklet_vec, cpu).head;
641 per_cpu(tasklet_hi_vec, cpu).tail =
642 &per_cpu(tasklet_hi_vec, cpu).head;
643 }
644
645 open_softirq(TASKLET_SOFTIRQ, tasklet_action);
646 open_softirq(HI_SOFTIRQ, tasklet_hi_action);
647 }softirq_init 函数默认会打开 TASKLET_SOFTIRQ 和HI_SOFTIRQ。
tasklet 是利用软中断来实现的另外一种下半部机制,在软中断和 tasklet 之间,建议大家使
用 tasklet。 Linux 内核使用结构体:
484 struct tasklet_struct
485 {
486 struct tasklet_struct *next; /* 下一个 tasklet */
487 unsigned long state; /* tasklet 状态 */
488 atomic_t count; /* 计数器,记录对 tasklet 的引用数 */
489 void (*func)(unsigned long); /* tasklet 执行的函数 */
490 unsigned long data; /* 函数 func 的参数 */
491 };tasklet_init 函数初始化 tasklet,taskled_init 函数原型如下:
void tasklet_init(struct tasklet_struct *t,
void (*func)(unsigned long),
unsigned long data);t:要初始化的 tasklet
func: tasklet 的处理函数。
data: 要传递给 func 函数的参数
返回值: 没有返回值。
使 用 宏 DECLARE_TASKLET 来 一 次 性 完 成 tasklet 的 定 义 和 初 始 化:
DECLARE_TASKLET(name, func, data) 其中 name 为要定义的 tasklet 名字,这个名字就是一个 tasklet_struct 类型的时候变量, func就是 tasklet 的处理函数, data 是传递给 func 函数的参数。
在上半部,也就是中断处理函数中调用 tasklet_schedule 函数就能使 tasklet 在合适的时间运
行, tasklet_schedule 函数原型如下:
void tasklet_schedule(struct tasklet_struct *t)t:要调度的 tasklet,也就是 DECLARE_TASKLET 宏里面的 name。
返回值: 没有返回值。
工作队列是另外一种下半部执行方式
要推后的工作可以睡眠那么就可以选择工作队列,否则的话就只能选择软
中断或 tasklet。
work_struct 结构体表示一个工作:
struct work_struct {
atomic_long_t data;
struct list_head entry;
work_func_t func; /* 工作队列处理函数 */
};工作队列使用 workqueue_struct 结构体表示。
worker 结构体表示工作者线程。
每个 worker 都有一个工作队列。
只需要定义工作(work_struct)即可。
直接定义一个 work_struct 结构体
变量即可,然后使用 INIT_WORK 宏来初始化工作:
#define INIT_WORK(_work, _func)_work 表示要初始化的工作, _func 是工作对应的处理函数。
DECLARE_WORK 宏一次性完成工作的创建和初始化:
#define DECLARE_WORK(n, f)n 表示定义的工作(work_struct), f 表示工作对应的处理函数。
工作的调度函数为 schedule_work,函数原型如下所示:
bool schedule_work(struct work_struct *work)work: 要调度的工作。
返回值: 0 成功,其他值 失败。
3.设备树中断信息节点
intc 节点就是I.MX6ULL 的中断控制器节点。
对于 ARM 处理的
GIC 来说,一共有 3 个 cells,这三个 cells 的含义如下:
第一个 cells:中断类型, 0 表示 SPI 中断, 1 表示 PPI 中断。
第二个 cells:中断号,对于 SPI 中断来说中断号的范围为 0~987,对于 PPI 中断来说中断
号的范围为 0~15。
第三个 cells:标志, bit[3:0]表示中断触发类型,为 1 的时候表示上升沿触发,为 2 的时候
表示下降沿触发,为 4 的时候表示高电平触发,为 8 的时候表示低电平触发。 bit[15:8]为 PPI 中
断的 CPU 掩码。
interrupt-controller 节点为空,表示当前节点是中断控制器。
gpio 节点也可以作为中断控制器。
简单总结一下与中断有关的设备树属性信息:
①、 #interrupt-cells,指定中断源的信息 cells 个数。
②、 interrupt-controller,表示当前节点为中断控制器。
③、 interrupts,指定中断号,触发方式等。
④、 interrupt-parent,指定父中断,也就是中断控制器。
4.获取中断号
irq_of_parse_and_map 函数从 interupts 属性中提取到对应的设备号:
unsigned int irq_of_parse_and_map(struct device_node *dev,
int index)| dev: 设备节点。 |
index:索引号, interrupts 属性可能包含多条中断信息,通过 index 指定要获取的信息。
返回值:中断号。
如果使用 GPIO 的话,可以使用 gpio_to_irq 函数来获取 gpio 对应的中断号,函数原型如
下:
int gpio_to_irq(unsigned int gpio)gpio: 要获取的 GPIO 编号。
返回值: GPIO 对应的中断号。
二、硬件原理图
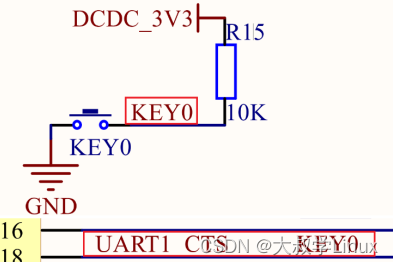
按键 KEY0 是连接到 I.MX6U 的 UART1_CTS 这个 IO 上的, KEY0接了一个 10K 的上拉电阻,因此 KEY0 没有按下的时候 UART1_CTS 应该是高电平,当 KEY0按下以后 UART1_CTS 就是低电平。
以下内容,将在后续的笔记中整理更新:
三、驱动开发
1.修改设备树文件
2.按键中断驱动程序编写
3.编写测试APP
四、运行测试
1.编译驱动程序和测试APP
2.运行测试
五、总结
本文为参考正点原子开发板配套教程整理而得,仅用于学习交流使用,不得用于商业用途。
- 上一篇:进入Linux的世界
- 下一篇:搭建自己的搜索引擎之三
- 程序开发学习排行
- 最近发表