

【kubernetes】使用virtual-kubelet扩展k8s
作者:小教学发布时间:2023-09-28分类:程序开发学习浏览:236
1 何为virtual-kubelet?
kubelet是k8s的agent,负责监听Pod的调度情况,并运行Pod。而virtual-kubelet不是真实跑在宿主机上的,而是一个可以跑在任何地方的进程,该进程向k8s伪装成一个真实的Node,但是实际的操作可以自定义。
也就是说,virtual-kubelet向k8s提供与kubelet兼容的接口,而可以自定义底层的具体实现,通常可以用于不同架构之间的配合使用,例如,virtual-kubelet的底层的具体实现是采用kvm实现,或者用另一种方式实现Pod。
virtual-kubelet的使用场景:
- 对接原有的平台:Kubernetes Virtual Kubelet with ACI
- 资源的自动扩容:UCloud UK8S虚拟节点 让用户不再担心集群没有资源
2 virtual-kubelet的整体架构
virtual-kubelet
整个virtual-kubelet仓库重要的目录是:
- cmd/virtual-kubelet/
- main.go 主函数,负责自动virtual-kubelet,依旧使用了Cobra实现
- register.go 注册provider,这里实现了个Mock的provider
- internal/
- commands/ 程序命令的定义,
- provider/
- provider.go provider的接口定义
- mock/ mock的provider的实现
- internal/ 额外实现的一些包供内部调用
- node/ kubelet中的一些逻辑
因此,整个仓库的整体调用路径是:
- main.go使用Cobra构建命令行操作,然后调用register.go注册provider,进入事件循环
- node/目录下有PodController的实现,这里面就会调用注册的provider
3 基于virtual-kubelet库扩展k8s
使用virtual-kubelet扩展k8s有2种方式:
- 1 直接克隆virtual-kubelet仓库,然后在cmd/virtual-kubelet/internal/provider下面新建一个自己的provider,然后实现provider接口的各种方法,然后在cmd/virtual-kubelet/register.go中注册自己实现的provider即可
- 2 新开一个仓库,在里面使用virtual-kubelet包,同样的,只需要实现provider,在主函数中注册,然后将provider的接口对接到自己的实现就行
如果是自己实现virtual-kubelet,通常会使用方式2。
当前,部分云厂商已经开发了自己的virtual-kubelet用于对接自己的容器平台,例如,微软开发了对接ACI的azure-aci,下面重点来分析azure-aci的实现,自己实现的方式也类似。
4 Microsoft的azure-aci
virtual-kubelet/azure-aci的目录结构如下:
- charts/:helm打包生成的压缩包
- client/:封装对接ACI的接口
- aci/:对ACI容器组的接口封装
- api/:封装ACI接口时使用的一些功能函数
- network/:封装ACI的subnet的接口
- resourcegroups/:封装ACI的资源组的接口
- cmd/virtual-kubelet/main.go:主函数,日志和配置处理,注册ACIProvider并启动
- helm/:helm的配置
- provider/:ACIProvider的实现,调用client中的函数实现provider
main.go中就是一些环境配置和启动函数:
// 获取环境变量中的配置
// 例如,节点名、kubeconfig文件、污点
o, err := opts.FromEnv()
if err != nil {
log.G(ctx).Fatal(err)
}
o.Provider = "azure"
o.Version = strings.Join([]string{k8sVersion, "vk-azure-aci", buildVers, "-")
o.PodSyncWorkers = numberOfWork
// 初始化node节点
node, err := cli.New(ctx,
cli.WithBaseOpts(o),
cli.WithCLIVersion(buildVersion, buildTime),
cli.WithProvider("azure", func(cfg provider.InitConfig) (proviProvider, error) {
return azprovider.NewACIProvider(cfg.ConfigPath, ResourceManager, cfg.NodeName, cfg.OperatingSystem, InternalIP, cfg.DaemonPort, cfg.KubeClusterDomain)
}),
cli.WithPersistentFlags(logConfig.FlagSet()),
cli.WithPersistentPreRunCallback(func() error {
return logruscli.Configure(logConfig, logger)
}),
cli.WithPersistentFlags(traceConfig.FlagSet()),
cli.WithPersistentPreRunCallback(func() error {
return opencensuscli.Configure(ctx, &traceConfig, o)
}),
if err != nil {
log.G(ctx).Fatal(err)
if err := node.Run(ctx); err != nil {
log.G(ctx).Fatal(err)
}
上面的核心代码就是WithProvider(),该函数有两个参数,一个是provider的名称,另一个是provider的初始化函数,这里传的初始化函数就是创建ACIProvider:azprovider.NewACIProvider()。
func WithProvider(name string, f provider.InitFunc) Option {
return func(c *Command) {
if c.s == nil {
c.s = provider.NewStore()
}
c.s.Register(name, f)
}
}
这个地方需要注意的是初始化函数的参数:cfg provider.InitConfig:
type InitConfig struct {
ConfigPath string
NodeName string // 注册到k8s到节点名称
OperatingSystem string // 节点的操作系统
InternalIP string // 节点的IP
DaemonPort int32 // 节点的端口
KubeClusterDomain string // k8s集群域名
ResourceManager *manager.ResourceManager
}
provider.InitConfig里面大部分都是VK节点向k8s集群声明自己的一些信息。这些信息是通过初始化函数直接给到provider到初始化函数的,那么这些参数从哪里获得呢?
第一种方式,前面调用了opts.FromEnv(),该函数会从环境变量中获取一些信息,但是这个只有很少量的信息:节点名、端口、kubconfig、污点。
第二种方式,在执行azure-aci时传一些命令行参数,通过查看cli.New()函数的实现发现,该函数返回的实际上是个Command,该类型的cmd是个cobra.Command,cmd在创建命令时调用了installFlags(cmd.Flags(), o),该函数会添加很多命令行选项,其中包含常见的的cluster-domain、nodename、provider等。其实,直接编译执行也能发现该程序等命令行参数。
这些命令行参数里面,比较重要的是:
- disable-taint:关闭污点,如果VK节点需要调度Pod,就需要启用该选项
- nodename:节点名称
- cluster-domain:集群域名,连接k8s集群时使用
- no-verify-clients:当请求访问VK节点时,不验证客户端证书
接下来的重点就是azprovider.NewACIProvider()的实现,从上面的目录结构也可以看出,provider是对ACIProvider对provider接口的实现,client是对ACI接口的封装,在实现ACIProvider过程中调用client进行对接:
provider -> client -> ACI
NewACIProvider()函数在provider/aci.go中实现,其中的核心逻辑是:
// 创建ACI客户端
p.aciClient, err = aci.NewClient(azAuth, p.extraUserAgent, p.retryConfig)
if err != nil {
return nil, err
}
// 设置节点容量
if err := p.setupCapacity(context.TODO()); err != nil {
return nil, err
}
接下来就是接口实现,kubelet最本质的工作就是监听Pod的状态变更,然后执行相应的动作,因此,当然是需要实现Pod的相关操作。
下面是VK所有的接口:
// pod控制器调用的接口,用于管理pod的生命周期
type PodLifecycleHandler interface {
// 创建Pod
CreatePod(ctx context.Context, pod *corev1.Pod) error
// 更新Pod
UpdatePod(ctx context.Context, pod *corev1.Pod) error
// 删除Pod
DeletePod(ctx context.Context, pod *corev1.Pod) error
// 查询单个Pod,返回的Pod有可能被多个goroutine并发访问,
// 因此,最好使用DeepCopy深拷贝
GetPod(ctx context.Context, namespace, name string) (*corev1.Pod, error)
// 查询单个Pod对应的状态,同样的,需要使用DeepCopy
GetPodStatus(ctx context.Context, namespace, name string) (*corev1.PodStatus, error)
// 查询provider上运行的所有Pod,同样的,需要使用DeepCopy
GetPods(context.Context) ([]*corev1.Pod, error)
}
// 下面是必须要实现的函数,除了Pod,还包含其他的相关函数
type Provider interface {
node.PodLifecycleHandler
// 返回某个容器的日志(kubectl logs)
GetContainerLogs(ctx context.Context, namespace, podName, containerName string, opts api.ContainerLogOpts) (io.ReadCloser, error)
// 在容器中执行命令(kubectl exec)
RunInContainer(ctx context.Context, namespace, podName, containerName string, cmd []string, attach api.AttachIO) error
// 设置节点的参数,包含容量、condition等
ConfigureNode(context.Context, *v1.Node)
}
// 返回Pod的统计
type PodMetricsProvider interface {
GetStatsSummary(context.Context) (*statsv1alpha1.Summary, error)
}
// 用于支持Pod状态的异步更新
type PodNotifier interface {
// 异步通知Pod的状态,注册回调函数,当Pod状态发生变化时就会调用回调函数
NotifyPods(context.Context, func(*corev1.Pod))
}
type NodeProvider interface {
// 用于探测节点是否存活,k8s周期调用该函数确定节点是否存活
Ping(context.Context) error
// 异步通知节点的状态,注册回调函数,当节点状态发生变化时就会调用回调函数
NotifyNodeStatus(ctx context.Context, cb func(*corev1.Node))
}
以上接口中,除了Provider接口必须实现,其他接口都是可选的。
下面以CreatePod()为例看下azure的具体实现:
func (p *ACIProvider) CreatePod(ctx context.Context, pod *v1.Pod) error {
...
return p.createContainerGroup(ctx, pod.Namespace, pod.Name, &containerGroup)
}
func (p *ACIProvider) createContainerGroup(ctx context.Context, podNS, podName string, cg *aci.ContainerGroup) error {
ctx = addAzureAttributes(ctx, span, p)
cgName := containerGroupName(podNS, podName)
_, err := p.aciClient.CreateContainerGroup(
ctx,
p.resourceGroup,
cgName,
*cg,
)
if err != nil {
log.G(ctx).WithError(err).Errorf("failed to create container group %v", cgName)
}
return err
}
CreatePod()首先准备创建ACI容器组的资源,然后调用createContainerGroup(),该函数对接口调用再次封装,然后调用了aciClient的CreateContainerGroup()创建ACI容器组。而CreateContainerGroup()就是调用ACI的API接口创建容器组。PodLifecycleHandler中的函数实现方式都类似,只需要对接后端的接口即可。
实现了Provider接口,剩下的只需实现PodNotifier中的NotifyPods()。
NotifyPods()用于异步通知Pod的状态变化。设想下k8s展示Pod状态的实现,k8s如何知道Pod的状态呢?一种方式是k8s定时调用GetPods()接口就得到当前节点的所有Pod,当Node和Pod较多时,资源消耗还是有些多的。另一种方式就是,节点通过比较k8s认为节点有的Pod和ACI上实际有的容器组,就得到应该更新哪些Pod的状态。
Pod的异步更新实现在provider/podsTracker.go:
type PodsTrackerHandler interface {
// 查询存活的Pod
ListActivePods(ctx context.Context) ([]PodIdentifier, error)
// 查询Pod的状态
FetchPodStatus(ctx context.Context, ns, name string) (*v1.PodStatus, error)
// 清理Pod
CleanupPod(ctx context.Context, ns, name string) error
}
type PodsTracker struct {
rm *manager.ResourceManager
updateCb func(*v1.Pod)
handler PodsTrackerHandler
}
// NotifyPods函数的实现,该函数只在VK节点的PodController启动时调用一次
func (p *ACIProvider) NotifyPods(ctx context.Context, notifierCb func(*v1.Pod)) {
// Capture the notifier to be used for communicating updates to VK
p.tracker = &PodsTracker{
rm: p.resourceManager,
updateCb: notifierCb,
handler: p,
}
go p.tracker.StartTracking(ctx)
}
而在StartTracking()函数中会定时执行Pod的更新(updatePodsLoop)和删除(cleanupDanglingPods):
func (pt *PodsTracker) updatePodsLoop(ctx context.Context) {
// 从资源管理器获取当前节点的Pod
k8sPods := pt.rm.GetPods()
for _, pod := range k8sPods {
updatedPod := pod.DeepCopy()
ok := pt.processPodUpdates(ctx, updatedPod)
if ok {
pt.updateCb(updatedPod)
}
}
}
// 处理Pod的更新,返回值表明Pod的状态是否更新
func (pt *PodsTracker) processPodUpdates(ctx context.Context, pod *v1.Pod) bool {
// 调用ACI的接口获取Pod的状态
podStatusFromProvider, err := pt.handler.FetchPodStatus(ctx, pod.Namespace, pod.Name)
if err == nil && podStatusFromProvider != nil {
// 如果获取状态没有出错,并且返回了状态,则将状态信息更新到Pod
podStatusFromProvider.DeepCopyInto(&pod.Status)
return true
}
if errdef.IsNotFound(err) || (err == nil && podStatusFromProvider == nil) {
if pod.Status.Phase == v1.PodRunning {
// 如果k8s中的状态是Running,但是ACI容器组不存在,则将k8s中容器的状态设置为Failed,此时会重建Pod
pod.Status.Phase = v1.PodFailed
pod.Status.Reason = statusReasonNotFound
pod.Status.Message = statusMessageNotFound
now := metav1.NewTime(time.Now())
for i := range pod.Status.ContainerStatuses {
if pod.Status.ContainerStatuses[i].State.Running == nil {
continue
}
// 更新Pod的状态
pod.Status.ContainerStatuses[i].State.Terminated = &v1.ContainerStateTerminated{
ExitCode: containerExitCodeNotFound,
Reason: statusReasonNotFound,
Message: statusMessageNotFound,
FinishedAt: now,
StartedAt: pod.Status.ContainerStatuses[i].State.Running.StartedAt,
ContainerID: pod.Status.ContainerStatuses[i].ContainerID,
}
pod.Status.ContainerStatuses[i].State.Running = nil
}
return true
}
return false
}
if err != nil {
log.G(ctx).WithError(err).Errorf("failed to retrieve pod %v status from provider", pod.Name)
}
return false
}
// 删除Pod
func (pt *PodsTracker) cleanupDanglingPods(ctx context.Context) {
// 获取k8s中的Pod和ACI容器组
k8sPods := pt.rm.GetPods()
activePods, err := pt.handler.ListActivePods(ctx)
if err != nil {
log.G(ctx).WithError(err).Errorf("failed to retrive active container groups list")
return
}
if len(activePods) > 0 {
for i := range activePods {
// 遍历ACI容器组存活的Pod,如果k8s中没有对应的Pod,则删除ACI容器组
pod := getPodFromList(k8sPods, activePods[i].namespace, activePods[i].name)
if pod != nil {
continue
}
err := pt.handler.CleanupPod(ctx, activePods[i].namespace, activePods[i].name)
if err != nil && !errdef.IsNotFound(err) {
log.G(ctx).WithError(err).Errorf("failed to cleanup pod %v", activePods[i].name)
}
}
}
}
- updatePodsLoop:处理k8s中有,ACI容器组不存在的情况
- cleanupDanglingPods:处理ACI中有,k8s中不存在的情况
那么,virtual kubelet的整体结构如下:
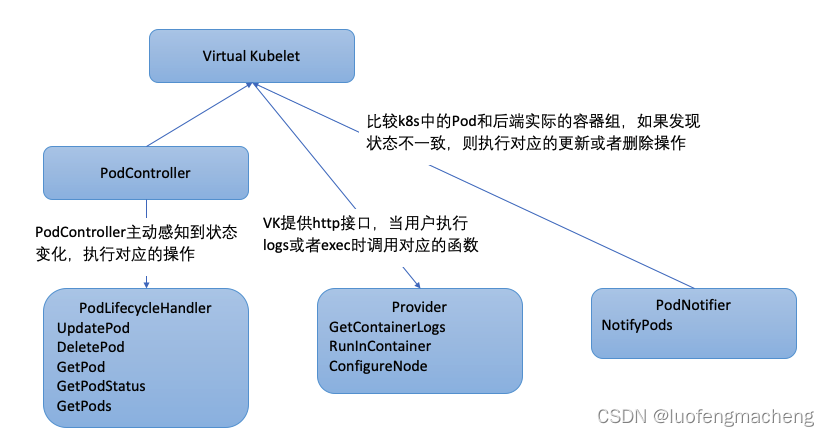
总结下上面的三条路径:
- PodController通过informer机制监听Pod的变化,然后执行Pod的增删改查操作
- virtual kubelet提供http接口,当用户执行
kubectl logs/exec时,就调用对应的函数,然后会调用Provider接口中对应的函数,这里主要难点在于需要实时将数据回传,展示给用户 - PodNotifier提供了异步更新Pod的接口,apiserver为了让etcd中Pod的数据与节点上Pod的数据保持一致,会定时调用节点的接口查询Pod的状态,当节点和Pod比较多时,比较消耗apiserver的资源。为了节省资源,节点会比较k8s中的Pod的数据和后端实际Pod的数据,如果发现有不一致(k8s中有该Pod,后端没有;k8s中没有该Pod,后端有),则执行状态的更新或者后端容器组的操作
5 关于logs和exec
Provider中剩下logs和exec则比较麻烦:
- GetContainerLogs 读取日志,如果需要支持
-f选项就比较麻烦 - RunInContainer 执行命令,需要实时将命令的结果传送回来
azure-aci中的logs不支持-f选项,因此,只需要调用ACI容器组的接口,获取日志就行。而exec则需要使用websocket进行实时的命令传送和结果回传。
具体的数据流向如下:
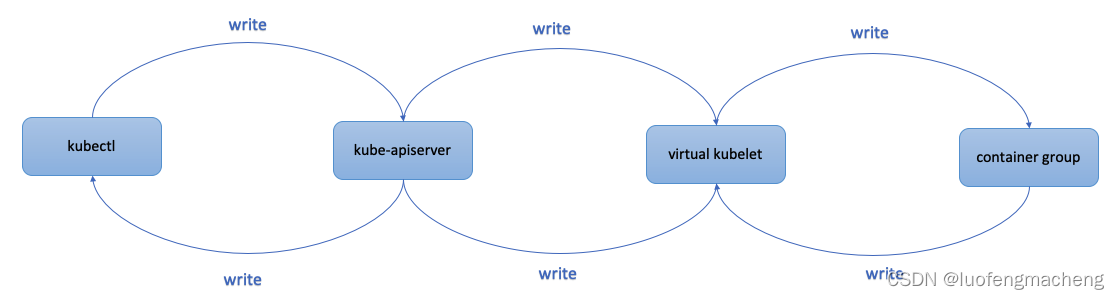
当用户在终端输入命令时,首先kubectl会先拿到命令,然后再交给kube-apiserver,kube-apiserver再将命令发送给kubelet,在这里就是virtual kubelet。那么,VK要做的就是读取命令,然后将命令发送给后端的容器组去执行,容器组执行完成后,再将结果推送给VK,VK则将结果推送给kube-apiserver,kube-apiserver将结果推送给kubectl,kubectl打印出来。这时候,用户看到的就类似于输入命令,然后输出结果。
而这些组件之间的数据流转需要实时推送,比较适合的方式就是使用websocket,这些组件之间通过websocket连接,连接之后,通过readmessage()和writemessage()进行数据传输。
从VK的角度看,需要做的就是:
- 使用websocket连接后端的容器组
- 从kube-apiserver读取数据,然后发送给后端的容器组
- 从后端的容器组接收数据,并输出给kube-apiserver
// api.AttachIO是个接口,Stdin()和Stdout()分别返回标准输入和标准输出
// VK需要从Stdin()中读取数据,然后写给后端的容器组,
// 同时,需要接收容器组返回的数据,然后发送给Stdout()
func (p *ACIProvider) RunInContainer(ctx context.Context, namespace, name, container string, cmd []string, attach api.AttachIO) error {
out := attach.Stdout()
if out != nil {
defer out.Close()
}
// 根据namespace和name获取容器组
cg, err := p.getContainerGroup(ctx, namespace, name)
if err != nil {
return err
}
// 设置终端默认大小
size := api.TermSize{
Height: 60,
Width: 120,
}
resize := attach.Resize()
if resize != nil {
select {
case size = <-resize:
case <-ctx.Done():
return ctx.Err()
}
}
// 获取ACI容器组的websocket的URI和密码
ts := aci.TerminalSizeRequest{Height: int(size.Height), Width: int(size.Width)}
xcrsp, err := p.aciClient.LaunchExec(p.resourceGroup, cg.Name, container, strings.Join(cmd, " "), ts)
if err != nil {
return err
}
wsURI := xcrsp.WebSocketURI
password := xcrsp.Password
// 连接ACI的websocket,并输入密码
c, _, _ := websocket.DefaultDialer.Dial(wsURI, nil)
if err := c.WriteMessage(websocket.TextMessage, []byte(password)); err != nil {
panic(err)
}
defer c.Close()
in := attach.Stdin()
if in != nil {
// 将读取命令并写入后端的容器组的逻辑放在后台的goroutine
go func() {
for {
// 如果父协程结束,直接退出
select {
case <-ctx.Done():
return
default:
}
// 读取kube-apiserver发送的命令,然后发送给后端的容器组
var msg = make([]byte, 512)
n, err := in.Read(msg)
if err != nil {
// Handle errors
return
}
if n > 0 {
if err := c.WriteMessage(websocket.BinaryMessage, msg[:n]); err != nil {
panic(err)
}
}
}
}()
}
if out != nil {
// 将接收容器组数据并写到kube-apiserver的逻辑放在前台任务
for {
// 如果父携程结束,则推出循环
select {
case <-ctx.Done():
break
default:
}
// 从容器组读取数据,然后发送给kube-apiserver
_, cr, err := c.NextReader()
if err != nil {
break
}
if _, err := io.Copy(out, cr); err != nil {
panic(err)
}
}
}
return ctx.Err()
}
从上面的实现上看,VK的角色是kubelet,用于连接kube-apiserver和Pod,因此,如果需要实时通信,就需要用websocket分别连接两端,作为桥梁对两边的数据进行中转。
- 上一篇:SpringMVC+入门案例
- 下一篇:内网穿透--cpolar
- 程序开发学习排行
- 最近发表