

debug过程中,矩阵左乘右乘相关概念梳理
作者:小教学发布时间:2023-09-28分类:程序开发学习浏览:251
1. 变换点或者变换向量
1.1左乘
矩阵左乘通常是指对”目标点“进行左乘,即:
A
′
=
R
∗
A
A'=R*A
A′=R∗A
其中,A为原始3维点,表示一个3*1的列向量,R为33的旋转矩阵,A‘为变换后的点
B
′
=
T
∗
B
B'=T*B
B′=T∗B
其中,B为原始点3维点,表示一个4*1的齐次化列向量,T为44的旋转矩阵R|t,B‘为变换后的点
以此类推,
如果是点云
c
l
o
u
d
s
r
c
=
{
X
s
r
c
∣
X
s
r
c
=
A
1
,
A
2
…
…
A
n
}
cloud_{src}=\{X_{src}|X_{src}=A_1,A_2……A_n\}
cloudsrc={Xsrc∣Xsrc=A1,A2……An},A表示一个3*1的列向量
此时
X
s
r
c
X_{src}
Xsrc为一个3*n的矩阵,那么变换可以表示为
X
A
′
=
R
∗
X
A
X_A'=R*X_A
XA′=R∗XA
X
B
′
=
T
∗
X
B
X_B'=T*X_B
XB′=T∗XB
1.1.1矩阵与旋转角
上面为3维点的变换,为了方便画图解释下面以2维点进行描述: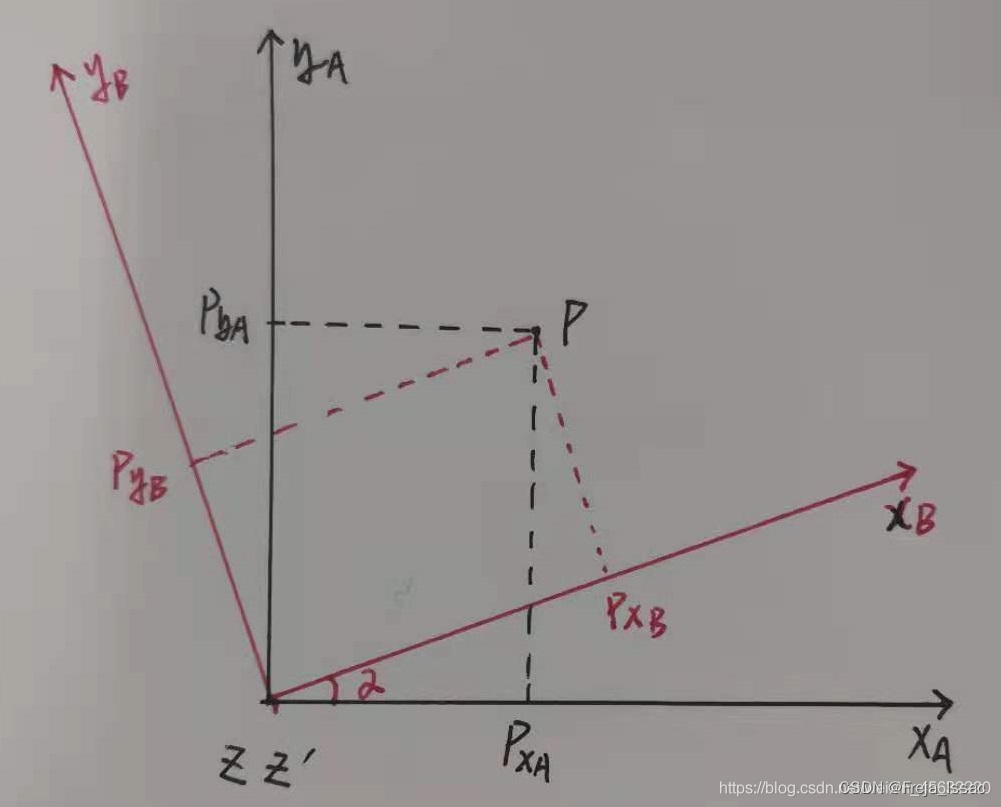
P
A
=
R
∗
P
B
P_A = R*P_B
PA=R∗PB
将矩阵乘法展开可以写为:
[
P
x
A
P
y
A
P
z
A
]
=
[
c
o
s
(
α
)
−
s
i
n
(
α
)
0
s
i
n
(
α
)
c
o
s
(
α
)
0
0
0
1
]
∗
[
P
x
B
P
y
B
P
z
B
]
\begin{bmatrix} P_{xA}\\P_{yA}\\P_{zA} \end{bmatrix} = \begin{bmatrix} cos(\alpha) & -sin(\alpha) & 0 \\ sin(\alpha) & cos(\alpha) & 0 \\ 0 & 0 & 1 \end{bmatrix}*\begin{bmatrix} P_{xB}\\P_{yB}\\P_{zB} \end{bmatrix}
PxAPyAPzA
=
cos(α)sin(α)0−sin(α)cos(α)0001
∗
PxBPyBPzB
上面图片表示的是一个矩阵的左乘,其中旋转矩阵R表达的是B点绕z轴逆时针旋转
α
\alpha
α度,得到A点。
如果是旋转一个坐标系的话,那么上面的矩阵表示的就是坐标B系绕Z轴顺时针旋转
α
\alpha
α度,得到A坐标系。
PS:此处顺逆时针都是Z轴朝上的,如果Z轴朝下,表达方式会有所不同。
这两个的表达是一个意思,矩阵表达也是一样的。(原因在于:虽然都是左乘,顺逆时针虽然相反,但是旋转矩阵R的选择是等价的,因此,从方程表达上是一样的。)
Z轴逆时针旋转点的R矩阵<==>Z轴顺时针旋转坐标系的R矩阵
[
c
o
s
(
α
)
−
s
i
n
(
α
)
0
s
i
n
(
α
)
c
o
s
(
α
)
0
0
0
1
]
\begin{bmatrix} cos(\alpha) & -sin(\alpha) & 0 \\ sin(\alpha) & cos(\alpha) & 0 \\ 0 & 0 & 1 \end{bmatrix}
cos(α)sin(α)0−sin(α)cos(α)0001
Z轴顺时针旋转点的R矩阵<==>Z轴逆时针旋转坐标系的R矩阵
[
c
o
s
(
α
)
s
i
n
(
α
)
0
−
s
i
n
(
α
)
c
o
s
(
α
)
0
0
0
1
]
\begin{bmatrix} cos(\alpha) & sin(\alpha) & 0 \\ -sin(\alpha) & cos(\alpha) & 0 \\ 0 & 0 & 1 \end{bmatrix}
cos(α)−sin(α)0sin(α)cos(α)0001
1.2右乘
没有具体例子:
1.3 左乘右乘同时存在的场景
针对transform增量(例如A坐标系下的R|t),变换坐标系的场景
求:点云
X
A
w
o
r
l
d
X_A^{world}
XAworld与点云
X
B
w
o
r
l
d
X_B^{world}
XBworld进行icp匹配,得到A点云到B点云的相对位姿
T
A
−
>
B
w
o
r
l
d
T_{A->B}^{world}
TA−>Bworld
已知,
lidar是一个在移动车辆上的sensor,输出A时刻,相对lidar坐标系的点云为
X
A
l
i
d
a
r
X_A^{lidar}
XAlidar;输出B时刻,相对lidar坐标系的点云为
X
B
l
i
d
a
r
X_B^{lidar}
XBlidar
imu是一个在移动车辆上的sensor,输出结果为mct坐标系下的结果,把mct坐标系下第一帧的时刻定义为固定坐标系:世界坐标系
P
P
i
m
u
A
w
o
r
l
d
PP_{imu_A}^{world}
PPimuAworldimu在A时刻的世界坐标系下,位姿矩阵PPa
P
P
i
m
u
B
w
o
r
l
d
PP_{imu_B}^{world}
PPimuBworldimu在B时刻的世界坐标系下,位姿矩阵PPb
imu到lidar的外参可以表述为
T
i
m
u
l
i
d
a
r
=
T
m
c
t
l
i
d
a
r
T_{imu}^{lidar}=T_{mct}^{lidar}
Timulidar=Tmctlidar,因为imu输出结果是在mct系下,所以外参可以看作是mct坐标系到lidar坐标系的变换
求解:
lidar的A时刻在世界坐标系(mct系)下的位姿矩阵为:
P
P
l
i
d
a
r
A
w
o
r
l
d
=
P
P
i
m
u
A
w
o
r
l
d
∗
T
i
m
u
l
i
d
a
r
=
P
P
i
m
u
A
w
o
r
l
d
∗
T
m
c
t
l
i
d
a
r
PP_{lidar_A}^{world}=PP_{imu_A}^{world}*T_{imu}^{lidar}=PP_{imu_A}^{world}*T_{mct}^{lidar}
PPlidarAworld=PPimuAworld∗Timulidar=PPimuAworld∗Tmctlidar
lidar的B时刻在世界坐标系(mct系)下的位姿矩阵为:
P
P
l
i
d
a
r
B
w
o
r
l
d
=
P
P
i
m
u
B
w
o
r
l
d
∗
T
i
m
u
l
i
d
a
r
=
P
P
i
m
u
B
w
o
r
l
d
∗
T
m
c
t
l
i
d
a
r
PP_{lidar_B}^{world}=PP_{imu_B}^{world}*T_{imu}^{lidar}=PP_{imu_B}^{world}*T_{mct}^{lidar}
PPlidarBworld=PPimuBworld∗Timulidar=PPimuBworld∗Tmctlidar
A时刻,相对世界坐标系(mct系)的点云为
X
A
w
o
r
l
d
=
P
P
l
i
d
a
r
A
w
o
r
l
d
∗
X
A
l
i
d
a
r
X_A^{world} = PP_{lidar_A}^{world}*X_A^{lidar}
XAworld=PPlidarAworld∗XAlidar,
可展开为:
X
A
w
o
r
l
d
=
P
P
i
m
u
A
w
o
r
l
d
∗
T
m
c
t
l
i
d
a
r
∗
X
A
l
i
d
a
r
X_A^{world} = PP_{imu_A}^{world}*T_{mct}^{lidar}*X_A^{lidar}
XAworld=PPimuAworld∗Tmctlidar∗XAlidar
B时刻,相对世界坐标系(mct系)的点云为
X
B
w
o
r
l
d
=
P
P
l
i
d
a
r
B
w
o
r
l
d
∗
X
B
l
i
d
a
r
X_B^{world} = PP_{lidar_B}^{world}*X_B^{lidar}
XBworld=PPlidarBworld∗XBlidar
可展开为:
X
B
w
o
r
l
d
=
P
P
i
m
u
B
w
o
r
l
d
∗
T
m
c
t
l
i
d
a
r
∗
X
B
l
i
d
a
r
X_B^{world} = PP_{imu_B}^{world}*T_{mct}^{lidar}*X_B^{lidar}
XBworld=PPimuBworld∗Tmctlidar∗XBlidar
经过icp匹配
X
A
w
o
r
l
d
X_A^{world}
XAworld和
X
B
w
o
r
l
d
X_B^{world}
XBworld可以得到
T
A
−
>
B
w
o
r
l
d
T_{A->B}^{world}
TA−>Bworld
但是因为imu和lidar时间戳不同步,因此对应时刻imu的位姿矩阵不可信,因此只能得到mct系下AB时刻的点云
X
A
m
c
t
X_A^{mct}
XAmct和
X
B
m
c
t
X_B^{mct}
XBmct
经过icp匹配
X
A
l
i
d
a
r
X_A^{lidar}
XAlidar和
X
B
l
i
d
a
r
X_B^{lidar}
XBlidar可以得到变换矩阵
T
A
−
>
B
l
i
d
a
r
T_{A->B}^{lidar}
TA−>Blidar
经过icp匹配
X
A
m
c
t
X_A^{mct}
XAmct和
X
B
m
c
t
X_B^{mct}
XBmct可以得到变换矩阵
T
A
−
>
B
m
c
t
T_{A->B}^{mct}
TA−>Bmct
其中,
X
A
m
c
t
=
T
m
c
t
l
i
d
a
r
∗
X
A
l
i
d
a
r
X_A^{mct}=T_{mct}^{lidar}*X_A^{lidar}
XAmct=Tmctlidar∗XAlidar,
X
B
m
c
t
=
T
m
c
t
l
i
d
a
r
∗
X
B
l
i
d
a
r
X_B^{mct}=T_{mct}^{lidar}*X_B^{lidar}
XBmct=Tmctlidar∗XBlidar
那么这个
T
A
−
>
B
l
i
d
a
r
T_{A->B}^{lidar}
TA−>Blidar和
T
A
−
>
B
m
c
t
T_{A->B}^{mct}
TA−>Bmct表示的是在不同坐标系下的同一个位姿变换矩阵(位姿变换增量矩阵)T=R|t,
这二者之间存在一个固定关系
X
A
l
i
d
a
r
X_A^{lidar}
XAlidar和
X
B
l
i
d
a
r
X_B^{lidar}
XBlidar内同一个特征点的坐标为
x
A
l
i
d
a
r
x_A^{lidar}
xAlidar和
x
B
l
i
d
a
r
x_B^{lidar}
xBlidar
x
A
m
c
t
=
T
l
i
d
a
r
m
c
t
∗
x
A
l
i
d
a
r
x_A^{mct}=T_{lidar}^{mct}*x_A^{lidar}
xAmct=Tlidarmct∗xAlidar,
x
B
m
c
t
=
T
l
i
d
a
r
m
c
t
∗
x
B
l
i
d
a
r
x_B^{mct}=T_{lidar}^{mct}*x_B^{lidar}
xBmct=Tlidarmct∗xBlidar
x
B
m
c
t
=
T
A
−
>
B
m
c
t
∗
x
A
m
c
t
x_B^{mct} = T_{A->B}^{mct}*x_A^{mct}
xBmct=TA−>Bmct∗xAmct
T
l
i
d
a
r
m
c
t
∗
x
B
l
i
d
a
r
=
T
A
−
>
B
m
c
t
∗
T
l
i
d
a
r
m
c
t
∗
x
A
l
i
d
a
r
T_{lidar}^{mct}*x_B^{lidar} = T_{A->B}^{mct}*T_{lidar}^{mct}*x_A^{lidar}
Tlidarmct∗xBlidar=TA−>Bmct∗Tlidarmct∗xAlidar
x
B
l
i
d
a
r
=
T
A
−
>
B
l
i
d
a
r
∗
x
A
l
i
d
a
r
x_B^{lidar} = T_{A->B}^{lidar}*x_A^{lidar}
xBlidar=TA−>Blidar∗xAlidar
T
l
i
d
a
r
m
c
t
∗
T
A
−
>
B
l
i
d
a
r
∗
x
A
l
i
d
a
r
=
T
A
−
>
B
m
c
t
∗
T
l
i
d
a
r
m
c
t
∗
x
A
l
i
d
a
r
T_{lidar}^{mct}*T_{A->B}^{lidar}*x_A^{lidar} = T_{A->B}^{mct}*T_{lidar}^{mct}*x_A^{lidar}
Tlidarmct∗TA−>Blidar∗xAlidar=TA−>Bmct∗Tlidarmct∗xAlidar
T
l
i
d
a
r
m
c
t
∗
T
A
−
>
B
l
i
d
a
r
=
T
A
−
>
B
m
c
t
∗
T
l
i
d
a
r
m
c
t
T_{lidar}^{mct}*T_{A->B}^{lidar} = T_{A->B}^{mct}*T_{lidar}^{mct}
Tlidarmct∗TA−>Blidar=TA−>Bmct∗Tlidarmct
T
A
−
>
B
l
i
d
a
r
=
(
T
l
i
d
a
r
m
c
t
)
−
1
∗
T
A
−
>
B
m
c
t
∗
T
l
i
d
a
r
m
c
t
T_{A->B}^{lidar} = (T_{lidar}^{mct})^{-1}*T_{A->B}^{mct}*T_{lidar}^{mct}
TA−>Blidar=(Tlidarmct)−1∗TA−>Bmct∗Tlidarmct
对应代码:np.dot(np.dot(np.linalg.inv(lidar2mct),delta_mat_mct),lidar2mct)
#验证lidar系下的icp匹配结果与mct系下的icp匹配结果相同
# mct系下的icp匹配结果 表达向量
delta_mat_mct = np.array([[0.999725 , -0.023439 , -0.00130324 , -0.127499] ,
[0.0234409 , 0.999724 , 0.00193209 , 0.0205244] ,
[0.00125752 , -0.0019622 , 0.999999 , -0.00368067] ,
[0.0 , 0.0 , 0.0 , 1]])
# lidar系下的icp匹配结果 表达向量
delta_mat_lidar = np.array([[0.999726 , -0.0234405 , 0.00044465 , -0.0937921] ,
[0.0234395 , 0.999723 , 0.00228773 , 0.140559] ,
[-0.000498197 , -0.00227667 , 0.999998 , -0.00616882] ,
[0 , 0 , 0 , 1]])
mct2lidar = np.array([[0.70710678, 0.70710678, 0.0, -1.477],
[-0.70710678, 0.70710678, 0.0, -0.77],
[0.0, 0.0, 1.0, -0.66],
[0.0, 0.0, 0.0, 1.0]])
lidar2mct = np.linalg.inv(mct2lidar)
print("mct2lidar : ")
print(mct2lidar)
print("lidar2mct : ")
print(lidar2mct)
print("delta_mat_mct:")
print(delta_mat_mct)
print("delta_mat_lidar -> delta_mat_mct:")
print(np.dot(np.dot(np.linalg.inv(mct2lidar),delta_mat_lidar),mct2lidar))
print("delta_mat_lidar")
print(delta_mat_lidar)
print("delta_mat_mct -> delta_mat_lidar")
#对应公式$T_{A->B}^{lidar} = (T_{lidar}^{mct})^{-1}*T_{A->B}^{mct}*T_{lidar}^{mct}$
print(np.dot(np.dot(np.linalg.inv(lidar2mct),delta_mat_mct),lidar2mct))
运行结果如下:
mct2lidar :
[[ 0.70710678 0.70710678 0. -1.477 ]
[-0.70710678 0.70710678 0. -0.77 ]
[ 0. 0. 1. -0.66 ]
[ 0. 0. 0. 1. ]]
lidar2mct :
[[ 0.70710678 -0.70710678 0. 0.4999245 ]
[ 0.70710678 0.70710678 0. 1.58886894]
[ 0. 0. 1. 0.66 ]
[ 0. 0. 0. 1. ]]
delta_mat_mct:
[[ 0.999725 -0.023439 -0.00130324 -0.127499 ]
[ 0.0234409 0.999724 0.00193209 0.0205244 ]
[ 0.00125752 -0.0019622 0.999999 -0.00368067]
[ 0. 0. 0. 1. ]]
delta_mat_lidar -> delta_mat_mct:
[[ 0.999725 -0.0234385 -0.00130325 -0.12747292]
[ 0.0234415 0.999724 0.00193208 0.02051356]
[ 0.00125757 -0.00196213 0.999998 -0.00367863]
[ 0. 0. 0. 1. ]]
delta_mat_lidar
[[ 9.99726e-01 -2.34405e-02 4.44650e-04 -9.37921e-02]
[ 2.34395e-02 9.99723e-01 2.28773e-03 1.40559e-01]
[-4.98197e-04 -2.27667e-03 9.99998e-01 -6.16882e-03]
[ 0.00000e+00 0.00000e+00 0.00000e+00 1.00000e+00]]
delta_mat_mct -> delta_mat_lidar
[[ 9.99725450e-01 -2.34404500e-02 4.44664099e-04 -9.38036435e-02]
[ 2.34394500e-02 9.99723550e-01 2.28772378e-03 1.40585449e-01]
[-4.98284007e-04 -2.27668585e-03 9.99999000e-01 -6.17034358e-03]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
2.变换矩阵左右乘/旋转矩阵左右乘
与变换某个目标不同,当一个坐标系发生连续变化时,如何描述这个坐标系的最终变换。
例如,先绕x轴顺时针转180度,然后绕z轴顺时针转45,最后绕y轴转30°
这个时候就会出现两种情况:
1.原始坐标系称为a0,先绕x轴(a0的x轴)顺时针转180度得到坐标系a1,然后绕z轴(这个z轴是a0的z轴)顺时针转45得到坐标系a2,最后绕y轴(这个y轴是a0的y轴)转30°
2.原始坐标系称为a0,先绕x轴(a0的x轴)顺时针转180度得到坐标系a1,然后绕z轴(这个z轴是a1的z轴)顺时针转45得到坐标系a2,最后绕y轴(这个y轴是a2的y轴)转30°
也就是,绕固定坐标系旋转还是绕自身坐标系旋转
此时有个口诀
!!!左乘旋转矩阵绕固定坐标系旋转,右乘旋转矩阵绕自身坐标系旋转!!!
在泊车项目中,一般都是按照平面处理的,也就是旋转的变化都是绕Z轴,因为无论是固定为初始坐标系还是自身坐标系Z轴都是不变的,因此,左乘右乘都可以。
但是上述仅仅是理想情况。
一般情况下都不是纯z轴变化,此时,就要区分是左乘还是右乘。
2.1右乘
2.1.1例如:求取外参【imu到lidar的外参】
已知:
前后左右上下,分别表示车体的前后左右上下
imu坐标系:X朝前,Y朝右,Z朝下
lidar坐标系:X朝右前45度,Y朝左前45度,Z朝上
lidar坐标系中心到imu坐标系中心在车体系下的相对位置关系为:
t
X
l
i
d
a
r
−
i
m
u
c
a
r
=
1.59
tX_{lidar-imu}^{car}=1.59
tXlidar−imucar=1.59
t
Y
l
i
d
a
r
−
i
m
u
c
a
r
=
−
0.5
tY_{lidar-imu}^{car}=-0.5
tYlidar−imucar=−0.5
t
Z
l
i
d
a
r
−
i
m
u
c
a
r
=
0.66
tZ_{lidar-imu}^{car}=0.66
tZlidar−imucar=0.66
从imu系到lidar系的变化可以归结为以下几步:
- 绕x轴顺时针旋转180度 =R1
- 绕z轴顺时针旋转45度 =R2
- 计算旋转矩阵R3=R2*R1
(此处计算R1*R2的结果是不一样的,虽然绕x轴顺时针旋转180度,z轴与原始z轴重合,但是这两个z轴朝向不同,因此在顺逆时针的旋转向量表达也会不同) - 计算车体系下的偏移量T{tX,tY,tZ}到lidar系的分量
t X l i d a r − i m u l i d a r = 1.47 tX_{lidar-imu}^{lidar}=1.47 tXlidar−imulidar=1.47
t Y l i d a r − i m u l i d a r = 0.77 tY_{lidar-imu}^{lidar}=0.77 tYlidar−imulidar=0.77
t Z l i d a r − i m u l i d a r = 0.66 tZ_{lidar-imu}^{lidar}=0.66 tZlidar−imulidar=0.66 - 将旋转R3和t结合得到T
过程如下:
R 3 = R 2 ∗ R 1 R_3=R_2*R_1 R3=R2∗R1
R 3 = [ c o s ( 45 ∗ π / 180 ) − s i n ( 45 ∗ π / 180 ) 0 s i n ( 45 ∗ π / 180 ) c o s ( 45 ∗ π / 180 ) 0 0 0 1 ] [ 1 0 0 0 c o s ( 180 ∗ π / 180 ) − s i n ( 180 ∗ π / 180 ) 0 s i n ( 180 ∗ π / 180 ) c o s ( 180 ∗ π / 180 ) ] R_3=\begin{bmatrix} cos(45*\pi/180) & -sin(45*\pi/180) & 0 \\ sin(45*\pi/180) & cos(45*\pi/180) & 0 \\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} 1 & 0 & 0 \\ 0 & cos(180*\pi/180) & -sin(180*\pi/180) \\ 0 & sin(180*\pi/180) & cos(180*\pi/180) \end{bmatrix} R3= cos(45∗π/180)sin(45∗π/180)0−sin(45∗π/180)cos(45∗π/180)0001 1000cos(180∗π/180)sin(180∗π/180)0−sin(180∗π/180)cos(180∗π/180)
R 3 = [ ( 2 ) / 2 − ( 2 ) / 2 0 ( 2 ) / 2 ( 2 ) / 2 0 0 0 1 ] [ 1 0 0 0 − 1 0 0 0 − 1 ] R_3=\begin{bmatrix} \sqrt(2)/2 & -\sqrt(2)/2 & 0 \\ \sqrt(2)/2 & \sqrt(2)/2 & 0 \\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} 1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & -1 \end{bmatrix} R3= (2)/2(2)/20−(2)/2(2)/20001 1000−1000−1
R 3 = [ ( 2 ) / 2 ( 2 ) / 2 0 ( 2 ) / 2 − ( 2 ) / 2 0 0 0 1 ] R_3=\begin{bmatrix} \sqrt(2)/2 & \sqrt(2)/2 & 0 \\ \sqrt(2)/2 &-\sqrt(2)/2 & 0 \\ 0 & 0 & 1 \end{bmatrix} R3= (2)/2(2)/20(2)/2−(2)/20001
PS:有的时候是从imu+gnss得到的结果,此时结果为经纬度+高程+航向角的结果,如果是按照经纬度是无法直接使用的需要转到mct(墨卡托)坐标系下,此时外参就不是从imu到lidar了,而是从mct到lidar。因为从gnss的坐标系到mct坐标系已经经历过一轮变换了,此时需要注意的是gnss坐标系输出的航向角heading是顺时针还是逆时针,这个heading(yaw)角需要与mct坐标系下的heading保持一致。
2.1.2例如: 累计 δ P o s e \delta Pose δPose得到每一个时刻的Pose
T
1
=
T
0
∗
δ
T
0
1
T_1=T_0*\delta T_0^1
T1=T0∗δT01
T
2
=
T
1
∗
δ
T
1
2
T_2=T_1*\delta T_1^2
T2=T1∗δT12
T
n
=
T
n
−
1
∗
δ
T
n
−
1
n
T_n=T_{n-1}*\delta T_{n-1}^n
Tn=Tn−1∗δTn−1n
T
n
=
T
0
∗
δ
T
0
1
∗
δ
T
1
2
…
…
∗
δ
T
n
−
1
n
T_n=T_0*\delta T_0^1*\delta T_1^2……*\delta T_{n-1}^n
Tn=T0∗δT01∗δT12……∗δTn−1n
2.1.3例如: 从imuPP(pose&postion)得到lidarPP(pose&postion)
已知外参:
E
x
t
r
i
n
s
i
c
=
T
i
m
u
l
i
d
a
r
Extrinsic=T_{imu}^{lidar}
Extrinsic=Timulidar
P
P
l
i
d
a
r
=
P
P
i
m
u
∗
T
i
m
u
l
i
d
a
r
PP_{lidar}=PP_{imu}*T_{imu}^{lidar}
PPlidar=PPimu∗Timulidar
PS:一般情况下imu的位姿矩阵会被理解为用多个空间3维点组成的轨迹,但其实不然,这个PP是有方向的,所以不能当成点/点云处理,而是当作变换矩阵处理(当前PP与世界初始坐标系原点的变换矩阵)。
又因为外参是相对自己坐标系的变换而不是相对世界初始坐标系(固定坐标系),所以外参也是用的右乘。
PS:
虽然此处的imupose可以看作是一个旋转位移增量矩阵,但是!!此处不是坐标系发生变换,与1.3的例子不同。此处是同一个坐标系下,imu轨迹和lidar轨迹存在一个刚性变换关系。同一个mct坐标系下,imupose和lidarpose的变换关系。
2.2左乘
暂时没有例子
- 程序开发学习排行
- 最近发表