

OpenCV(四十二):Harris角点检测
作者:小教学发布时间:2023-09-26分类:程序开发学习浏览:317
1.Harris角点介绍
什么是角点? 角点指的是两条边的交点,图中红色圈起来的点就是角点。

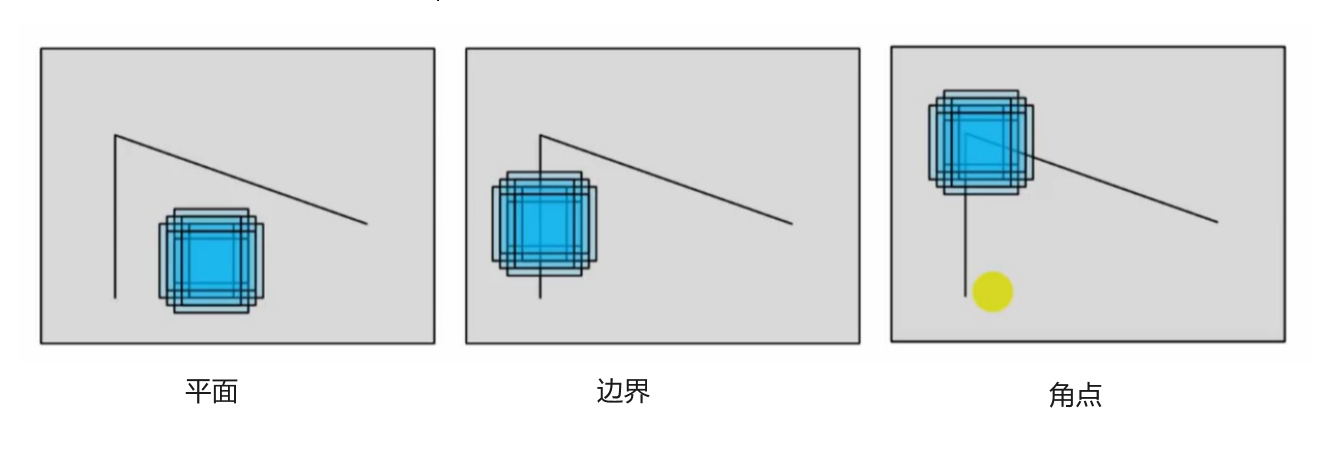
Harris角点检测原理:首先定义一个矩形区域,然后将这个矩形区域放置在我的图像中,求取这个区域内所有的像素值之和,之后沿着多个方向移动我这个区域,再次计算新区域的像素值之和,如果移动前和移动后的像素值两者的差值比较小,那么就不是Harris角点,如果两者之间差值比较大,就认定移动前覆盖的区域内存在Harris角点。
如图:下图两条线形成角点,而矩形区域分别表示平面、边界、角点三种位置:
2.Harris角点计算
Harris角点检测原理:当移动窗口,窗口内像素值变化大就有Harris角点
Harris角点检测原理公式:
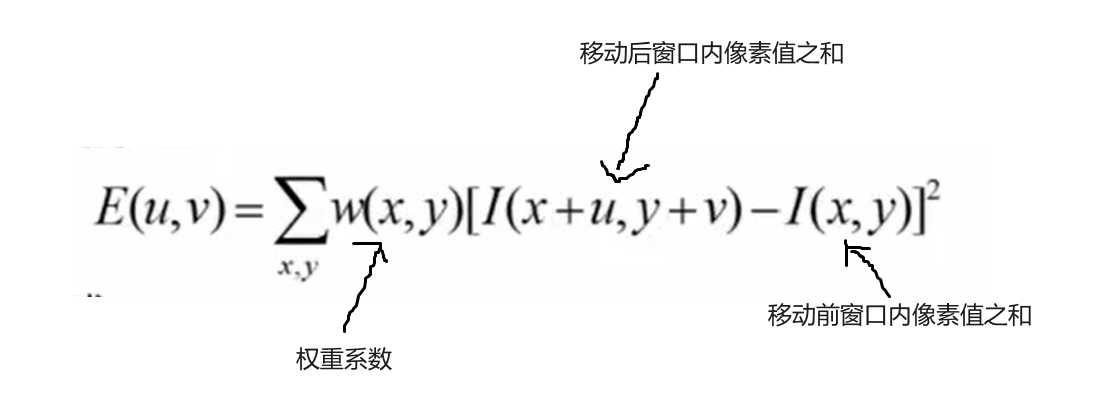
权重系数的引入是为了更加方便地去确定某一个点是Harris角点。
Harris角点检测原理公式写成矩阵形式:
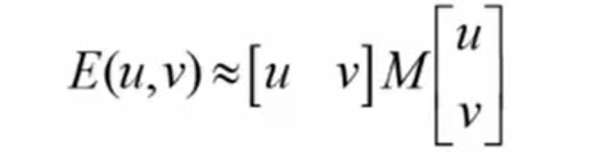
由此可得出梯度协方差矩阵M
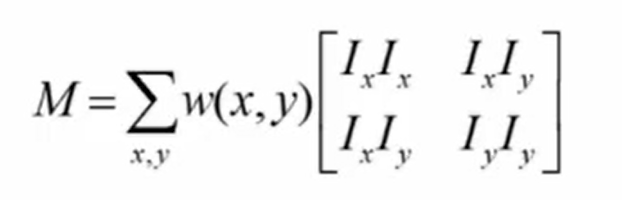
Harris评价函数来测量每个像素的角点程度 ,与梯度协方差矩阵M相关

在这个公式中,R是角点响应函数的值,M是一个2x2的矩阵,描述了局部区域中像素的梯度信息,det(M)表示矩阵的行列式,trace(M)表示矩阵的迹,k是一个常数,用于调节响应函数的敏感度。
Harris评价函数可以用特征向量来表示。λ1和λ2分别是M的两个特征值。

通过对特征值λ1和λ2进行求解,我们可以计算Harris评价函数R,并据此来判断像素是否为角点。
- 当λ1和λ2都较大且接近时,表示图像局部区域存在角点。
- 当λ1和λ2都比较小或者差异较大时,表示图像局部区域是平坦或者边缘区域。
3.检测Harris角点函数cornerHarris()
void cv::cornerHarris ( InputArray src,
OutputArray dst,
int blockSize,
int ksize,
double K,
int borderType = BORDER_DEFAULT
)
- src:待检测Harris角点的输入图像,图像必须是CV 8U或者CV 32F的单通道灰度图像
- dst: 存放Harris评价系数的R矩阵,数据类型为CV 32F的单通道图像,与输入图像具有相同的尺寸
- blockSize:邻域大小
- ksize: Sobel算子的半径,用于得到梯度信息
- k:计算Harris评价系数R的权重系数
- borderType:像素外推算法标志
4.绘制角点函数drawKeypoints()
void drawKeypoints(InputArray image,
const std::vector<KeyPoint>& keypoints,
OutputArray outImage,
const Scalar& color = Scalar::all(-1),
int flags = DrawMatchesFlags::DEFAULT
)
参数说明:
-
image: 输入图像,可以是任意类型的Mat对象。
-
keypoints: vector类型的关键点,每个关键点包含其在图像中的位置和其他信息(如尺度、方向等)。
-
outImage: 输出图像,用于存储绘制了特征点的图像。可以与输入图像相同的尺寸和类型。
-
color: 绘制特征点的颜色,可以是Scalar对象或CV_RGB(R, G, B)宏定义,默认为Scalar::all(-1)表示随机颜色。
-
flags: 绘制标志,用于控制绘制方式。可以是以下常量之一:
-
DrawMatchesFlags::DEFAULT: 默认绘制方式,显示关键点的位置和大小。
-
DrawMatchesFlags::DRAW_OVER_OUTIMG: 将关键点绘制在输出图像上,而不是创建新的输出图像。
-
DrawMatchesFlags::DRAW_RICH_KEYPOINTS: 绘制丰富的特征点,显示位置、尺度、方向等详细信息。
-
5.示例代码:
void Harris_f(Mat image){
//转成灰度图像
Mat gray;
cvtColor(image,gray,COLOR_BGR2GRAY);
// 执行Harris角点检测
Mat harris;
cornerHarris(gray,harris,2,3,0.04);
//归一化便于进行数值比较和结果显示
Mat harrisn;
normalize(harris,harrisn,0,255,NORM_MINMAX);
//将图像的数据类型变成CV_8U
convertScaleAbs(harrisn,harrisn);
//寻找Harris角点
vector<KeyPoint> keyPoints;
for(int row=0;row<harrisn.rows;row++){
for(int col=0;col<harrisn.cols;col++){
int R=harrisn.at<uchar>(row,col);
if(R<180){
//将角点存入KeyPoint中
KeyPoint keyPoint;
keyPoint.pt.y=row;
keyPoint.pt.x=col;
keyPoints.push_back(keyPoint);
}
}
}
//绘制角点
drawKeypoints(image,keyPoints,image,Scalar(0,0,255,255));
//与显示结果
imwrite("/sdcard/DCIM/harrisn.png",harrisn);
imwrite("/sdcard/DCIM/result.png",image);
}


(系数矩阵) (绘制Harris角点)
- 程序开发学习排行
- 最近发表